目前工业建设的步伐是突飞猛进,对测量设备的精度、使用范围、工作效率以及性价比提出了更高的要求。比如,高速铁路的轨道维护对检测设备精度和工作效率同时提出了极高的要求,是目前现有检测设备无法满足的。
限制传统检测设备性能的主要原因实际上不仅是制造工艺和技术问题,更多是测量理论及方法自身的缺陷所造成的。比如,测绘中所使用的直角坐标系本身就存在着很大的局限性,不适于对平滑线路的准确测量。
在实际应用中,人们的测绘对象往往是条平滑的曲线。对曲线形状的精确描述比其位置更为重要。而传统的测量设备只能测量某一点的位置,不能直接测量曲线的形状,因而影响测量精度。 |
|
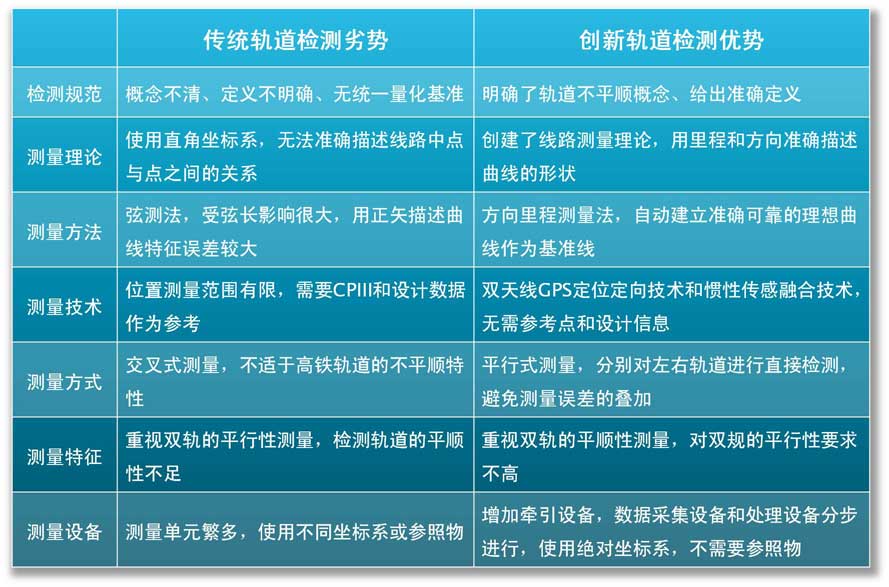
我们所创建的线路测量理论则从根本上避免了传统理论的局限,不仅能完美地描述平滑曲线及曲线的形状,而且能大幅度地简化计算过程和难度,同时提高线路测量的精度和准确性。在此基础上,结合本公司所具备的双天线GPS定位定向和惯性导航融合技术制造出一款全新的、专门适用于高铁轨道检测的高精度快速测量系统,其性能远高于国外最佳产品,完全满足目前高铁轨道检测的技术要求。具体分析创新轨道检测和传统轨道检测的优劣势如下: |
 |
| |
传统轨道检测均是通过测量位置或位移确定轨道不平顺的。事实上,轨道的平顺要求是一种形状要求,而不是位置要求。因此,测量轨道形状比测量位置和位移更直接、更有效。我公司所发明的方向里程测量法可以在无需设计数据和参考坐标的前提下,准确测量出轨道的几何不平顺。
测量小车是基于全新的测量思想、理论、方法和技术所制作的,使用了一系列的创新思想、理念和技术。比如,使用对线路形状测量替代传统的位置测量;使用方向里程坐标系替代直角坐标系;使用航空导航设备替代常用的激光测量设备测量轨道的里程、水平方向角和倾斜角;使用全球坐标系下的绝对测量替代对CPIII参照点的相对测量;使用平顺的理想线路替代设计线路作为检测轨道不平顺的基准;使用对双轨的独立测量替代传统的对轨道中心线和双轨间距的测量;着重轨道的相对不平顺测量替代绝对不平顺测量;使用在线数据采集和离线数据处理工作流程代替实时记录检测结果;使用牵引式操作替代推进式等等。分类简单概括为以下六个创新点: |
| |
| 创新思想 |
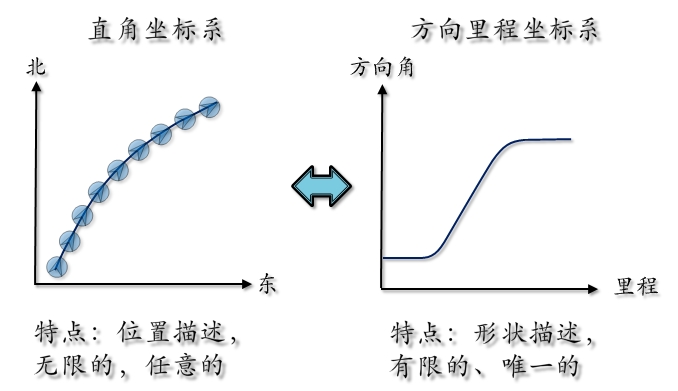
| 用形状代替位置描述轨道线路,用方向里程坐标代替平面直角坐标建立测量曲线。因为位置坐标包含了线路的整体位置和方向,整体位置和方向与平顺性无关。而方向和里程则着重描述轨道线路的形状,与起点位置和方向无关。因此,使用方向里程坐标显得更为简单直接。 |
| 创新理论 |
建立轨道检测理论的关键首先在于对轨道平顺性及不平顺的正确定义和量化标准的建立。
传统不平顺概念的定义是不够准确的,这是因为轨道的平顺性是一个线路形状概念,而线路形状有别与线路的位置。因此,使用位置或位置偏差是无法准确描述轨道的平顺性的。新的轨道检测理论对轨道不平顺进行了明确定义:不平顺是一种轨道线路在选定范围内(或称观测波长)出现周期性形状变化的属性。 |
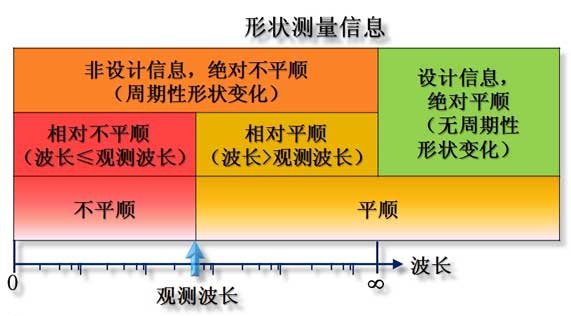 |
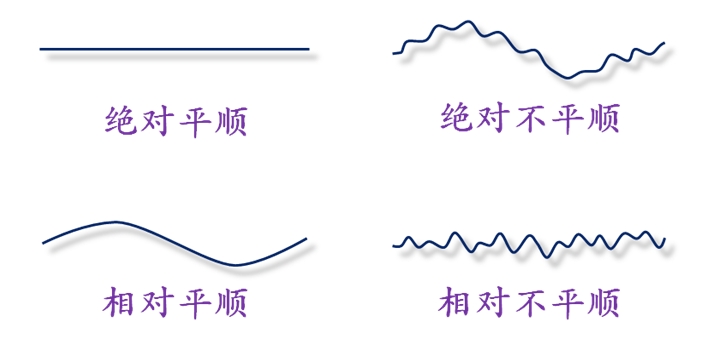
| 依照这一定义,我们提出了绝对平顺、绝对不平顺、相对平顺和相对不平顺等新概念,建立了检测轨道不平顺的新标准——理想线路,以此代替传统的设计线路,从而简化了数据处理过程,并保证检测结果的准确性和可靠性。 |
 |
| 创新方法 |
| 传统轨道检测方法主要以弦测法、惯性基准法或绝对测量法为主。其主要手段是测量轨道线路的位置或位移,以设计数据作为检测基准,用位移描述轨道的不平顺。我们所发明的检测方法叫方向里程测量法,是通过测量方向偏差确定轨道不平顺的。 |
 |
| |
| 创新技术 |
与传统的位置或位移测量技术不同,我们采用惯性测量技术的主要目的是测量轨道线路的里程、方向角、倾斜角和横滚角,而不是测量其位置坐标或加速度。因为里程、方向角、水平角和横滚角都是绝对值,无需参照点,因此,方向里程测量技术不需要依靠CPIII或其他地面设备支持,使用极为方便。
|
 |
| 创新模式 |
目前检测规范要求测量轨向、高低、轨距、水平和三角坑等不平顺参数,相当于交叉式测量,也就是说,确定左右钢轨不平顺需要使用多个测量参数,导致测量误差的叠加。我们采用的是双轨双测的工作模式,直接确定左右钢轨各自的不平顺。新检测模式的主要特征在于,强调测量双轨的平顺性,而不是双轨间平行性。
|
  |
|
| 创新功能 |
除左右轨道的几何不平顺参数外,我们的检测设备还可以直接测量轨道线路的线型、位置、长度及重要参数,如坡度、超高、曲线半径等。另外,还可以检测左右钢轨的轨顶坡不平顺。轨顶坡不平顺是导致车轮振动、晃动、产生噪声、钢轨异常波磨和侧磨的主要原因。由于车轮和钢轨结构所致,轮轨间的接触不应被看成是一条线,而是一条宽带,钢轨顶面的水平角度直接影响轮轨间接触位置和相互作用力。因此,轨顶坡不平顺的检测极为重要。 |
| 创新设备 |
传统的轨道静态检测设备都是以人工操作为主的,检测速度慢、劳动强度大、工作效率低。我们所发明的精密GPS惯导轨道检测系统首次实现轨道静态检测的机械化和自动化。实现时速20公里,精度0.1毫米的精确轨道检测。极大的降低了技术人员的劳动强度,提高了工作效率。 |
 .png) |
|
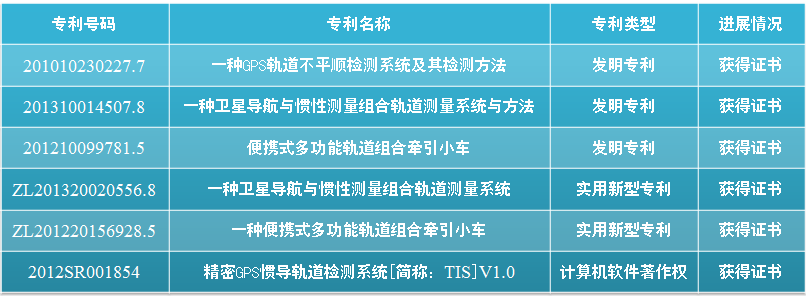
| 知识产权证书 |
创新内容达到二十几项,目前相关技术和产品已经得到国家专利部门的知识产权保护,具体如下表格所示。 |
 |
| PPT介绍 |
| 【PPT】一种检测轨道不平顺的理论与方法(简介) |
|
|
|
