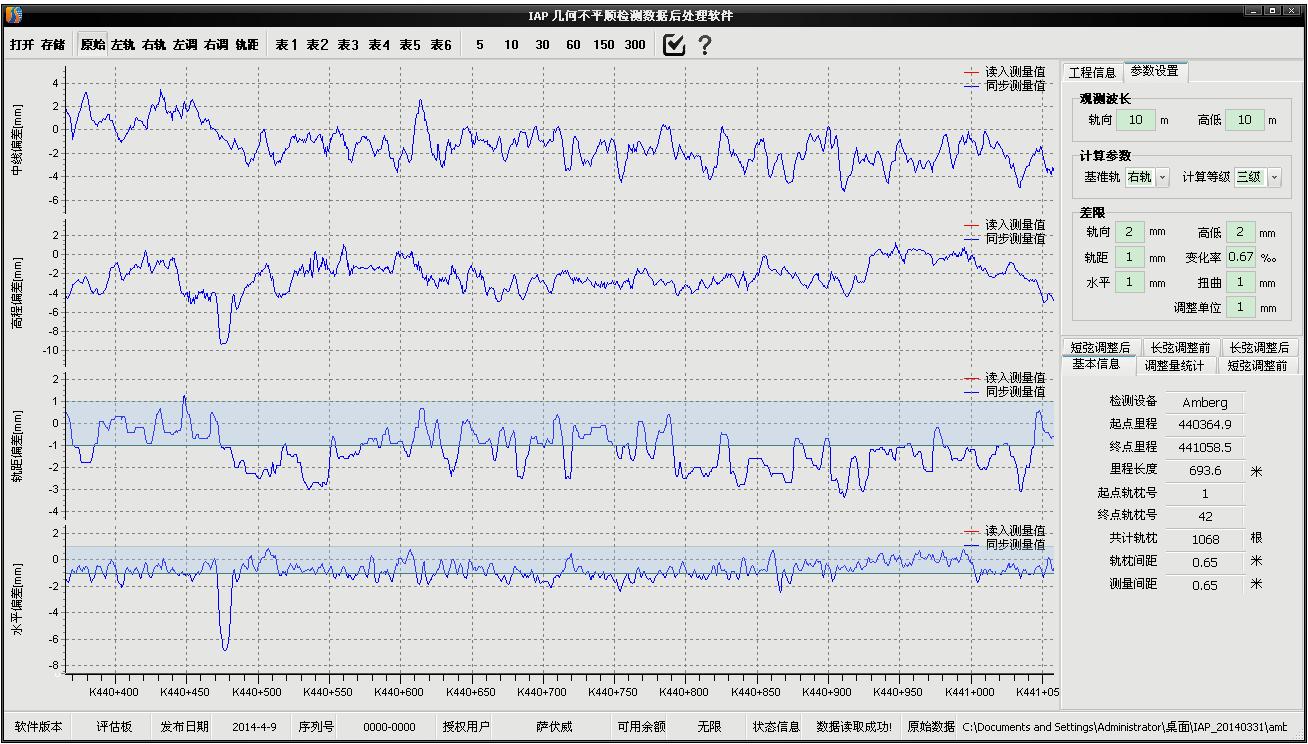
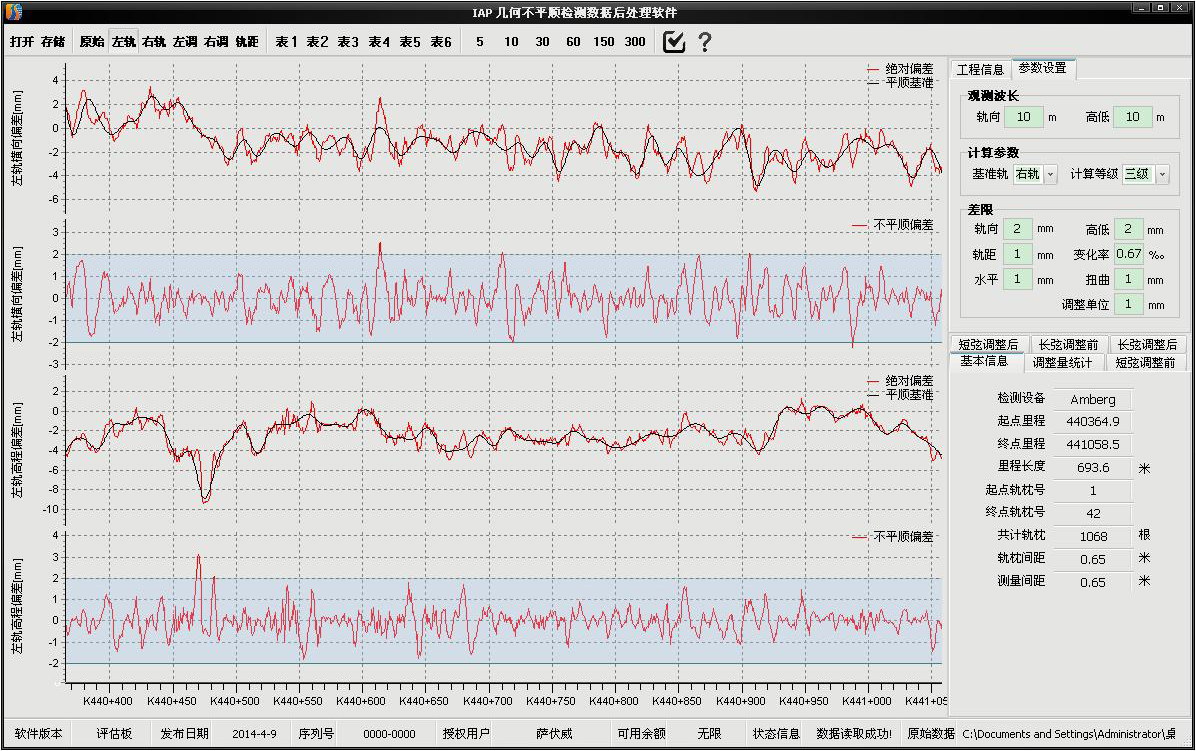
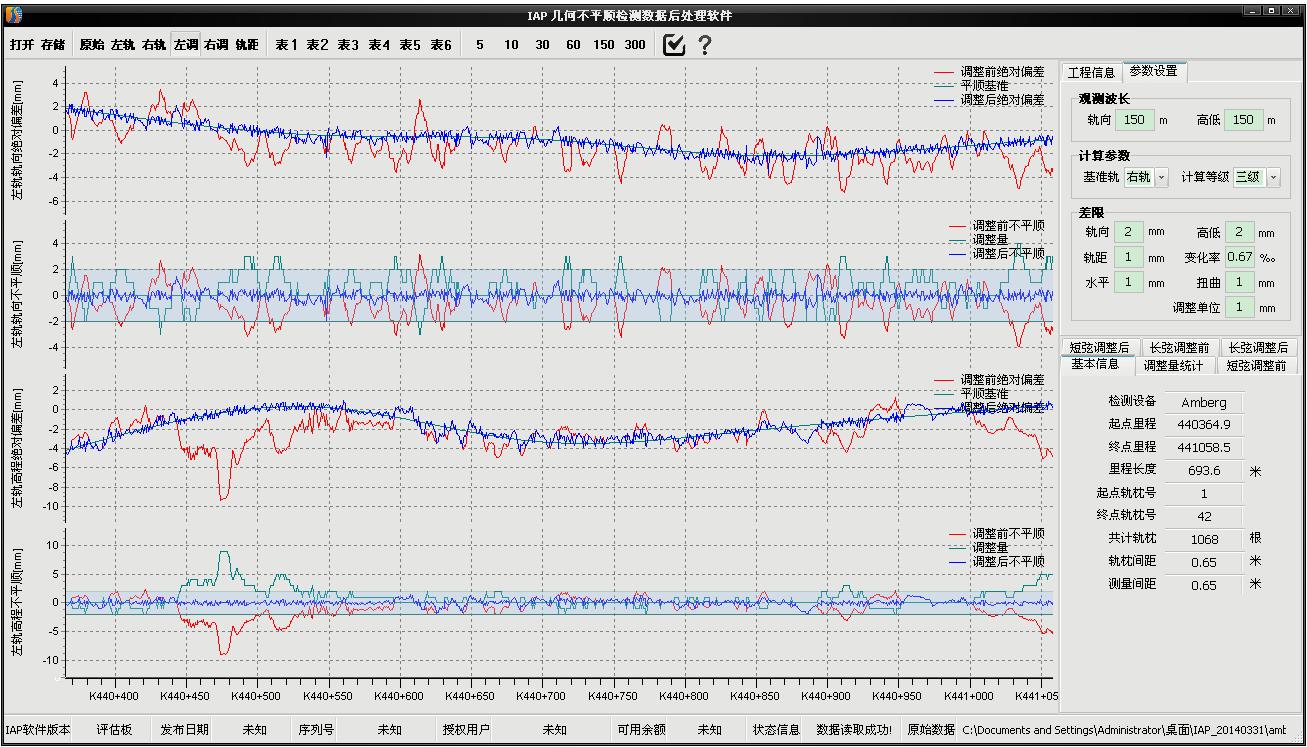
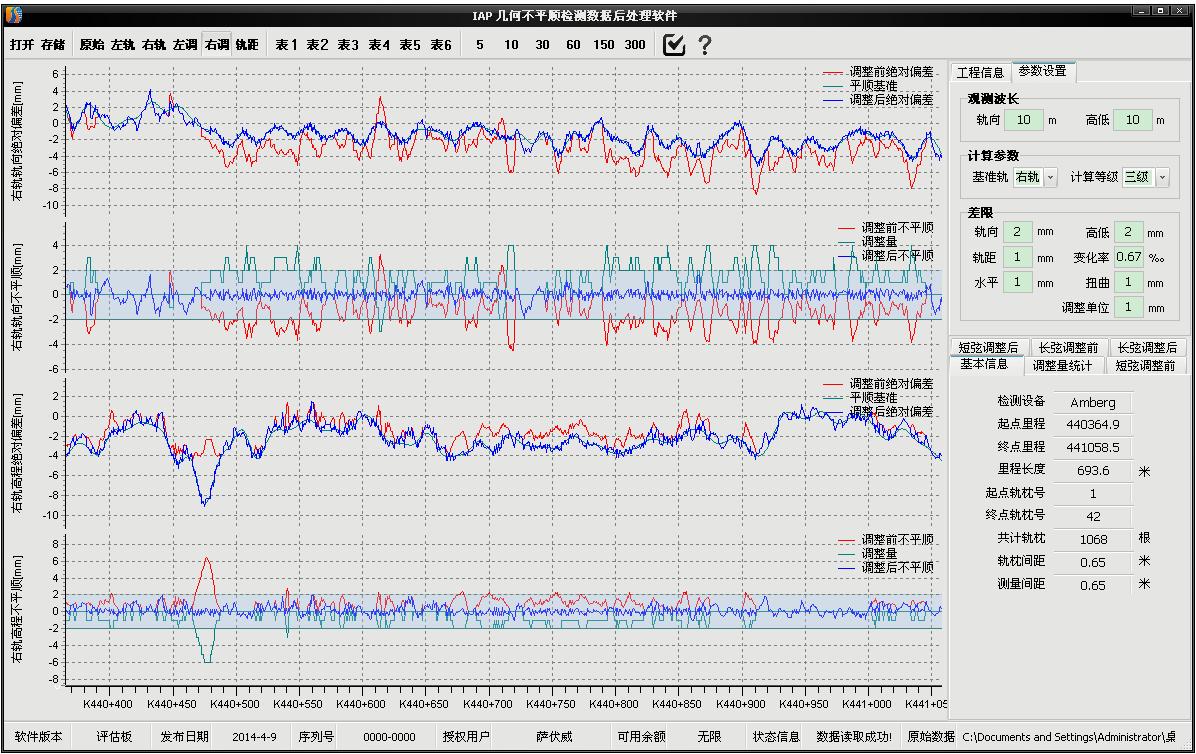
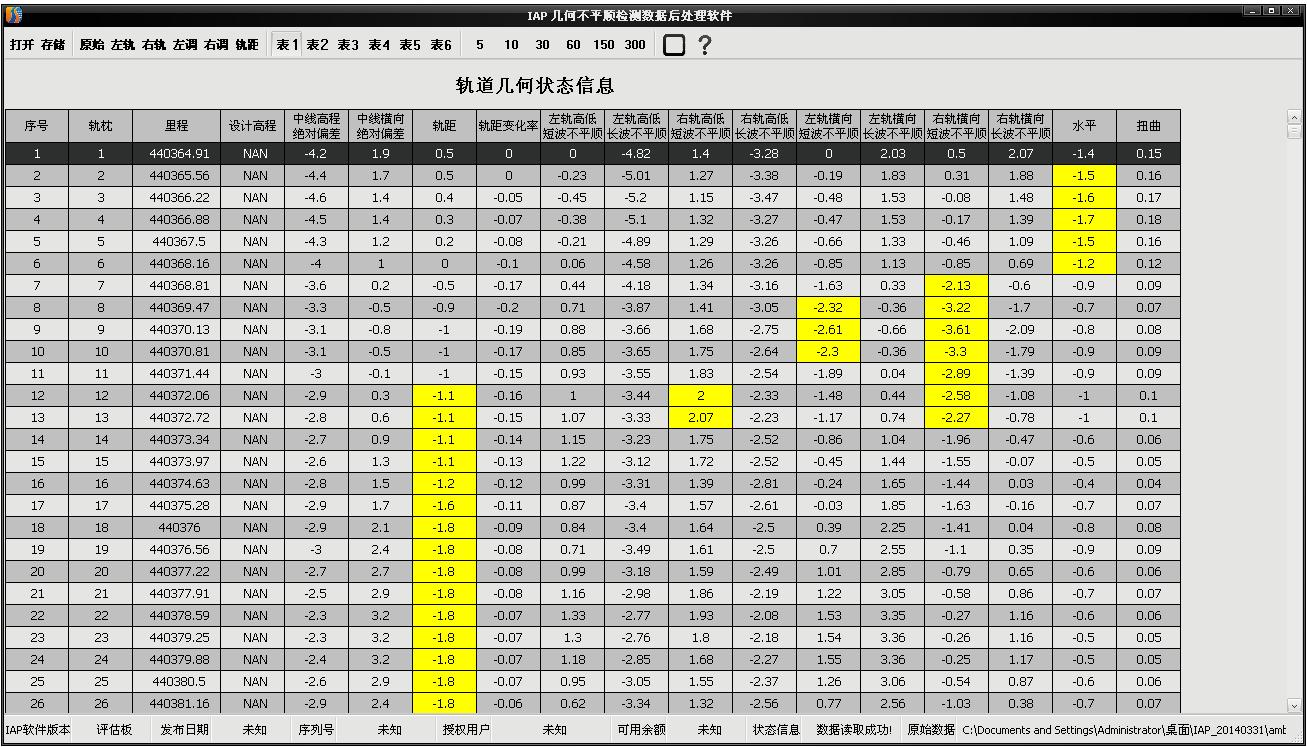
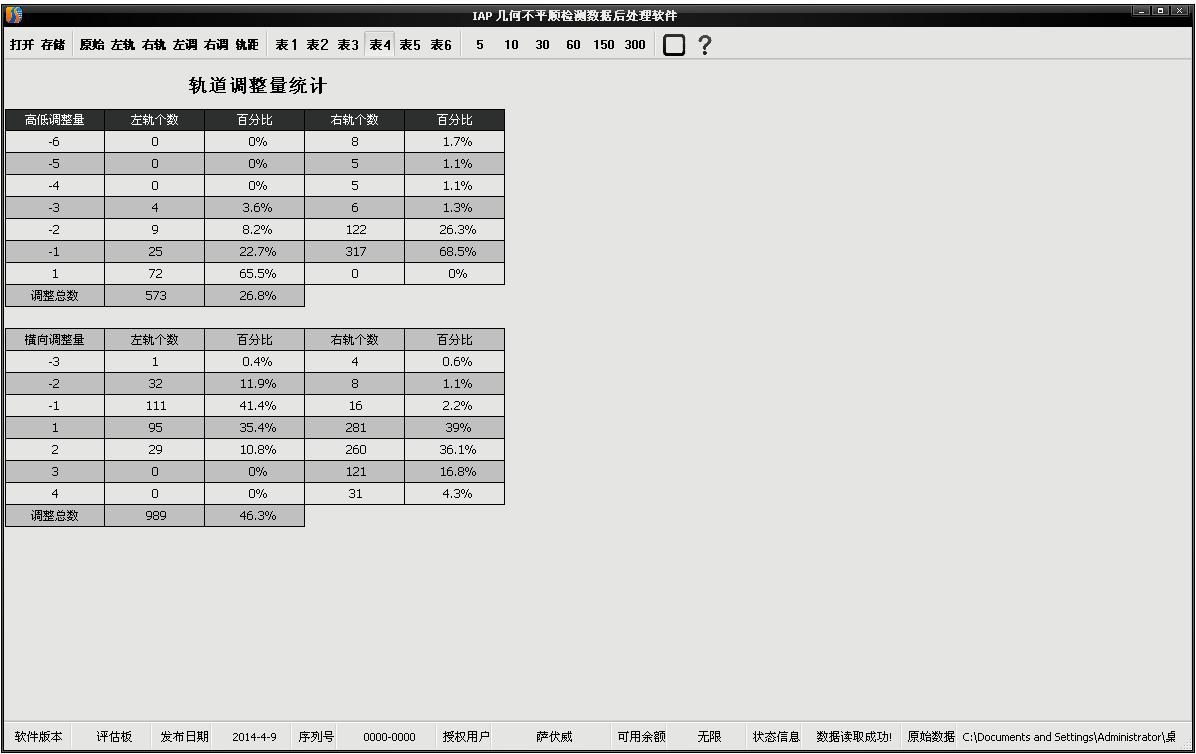
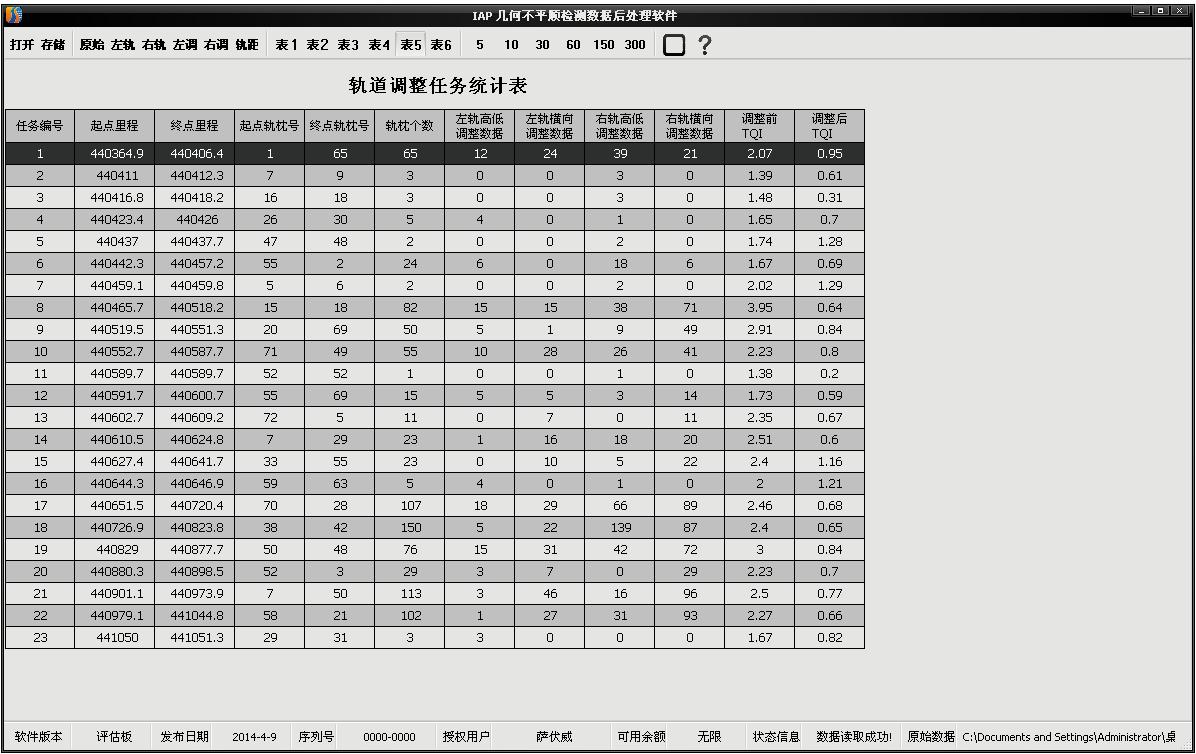
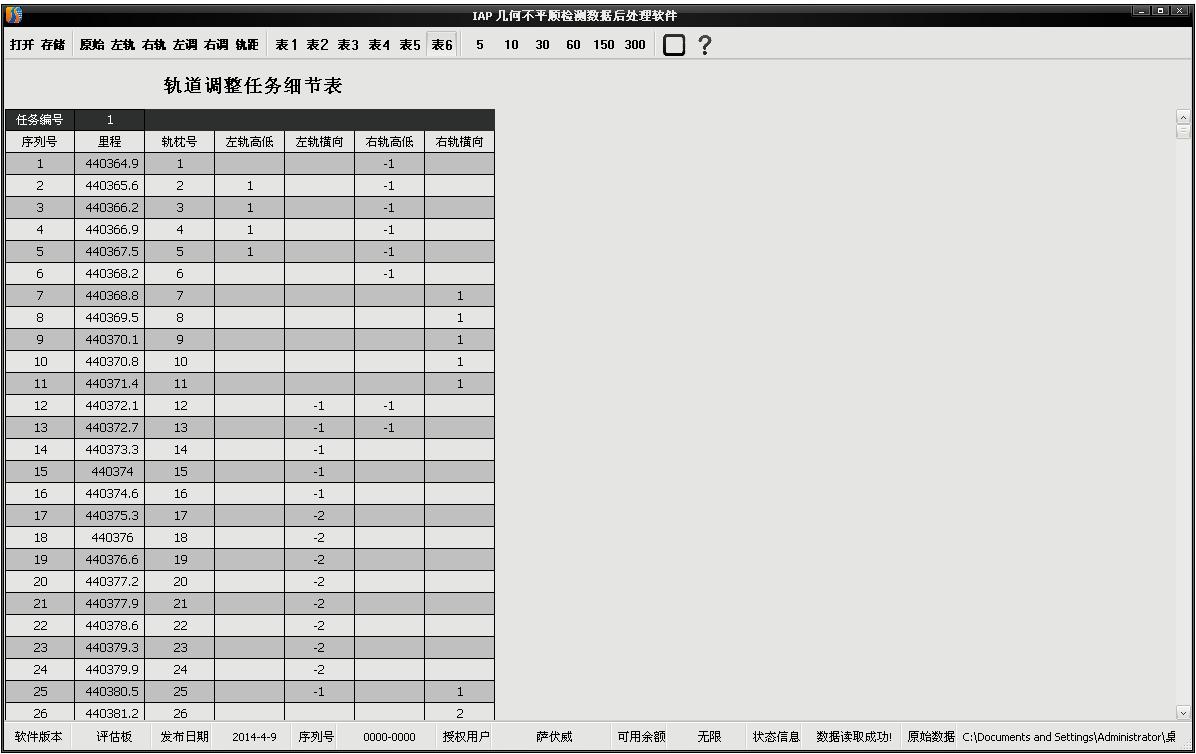
为了做到数据处理透明,IAP软件具备能够图像或表格显示原始测量数据、平顺数据、不平顺数据、调整量和调整后的剩余量等多项功能。并可以通过设置,改变观测波长和各种差限参数。软件快速计算出相应波长的短波不平顺和300米波长的各项长波不平顺参数、调整前后的轨道几何状态的标准差、TQI及统计量。还可以根据调整量的计算结果进行工作任务管理。
总之,使用IAP软件可以大幅度提高建立轨道调整量数据的速度和质量,保证一次调轨达标,避免因返工所造成的浪费。
软件具有优良的显示功能,便于操作人员对数据的直观分析。以下是几个软件最常用的基本功能:
1.局部显示:
一般情况下,有4个坐标同时显示测量数据。将鼠标移入其中任意一个坐标图中,在需要放大的起始点处按左键向右拉,当鼠标移动到所需放大区间的终止点后,放开左键,图像中的内容就自动放大到所数据区间了,所有坐标图中的数据会自动同步放大;
2.窗口移动:
将鼠标移动的坐标图中央,然后按鼠标右键或滚动鼠标滚轮便可以实现所显示数据的左右移动,所有窗口中的数据将同步移动;
3. 全部显示:
在显示坐标图中按左键向右滑,放开左键,就恢复的全局数据显示了;
4. 放大和缩小:
将鼠标移至所要查看的坐标图内,双击左键,坐标图将扩展到整个界面;然后再双击左键,就恢复到原先坐标图像大小;
5. 横坐标显示:
将鼠标移至下方的里程坐标上,按右键弹出窗口,选择所需项目(里程、轨枕号和序列号)即可。
6.波长观测设置:
观测波长对生成平顺基准曲线来说十分重要,因为观测波长越长,轨道的平顺性就越高,但调整量和调整值就会增加。按键“5m”、“10m”…“300m”等直接设置不同观测波长。也可通过“横向波长”和“高低波长”输入其它数值。 |